문서의 이전 판입니다!
모션 제어 시작하기
ComiIDE를 이용해 모션 제어를 하는 방법에 대한 안내 페이지입니다.
실행하기
- ComiIDE를 실행합니다.
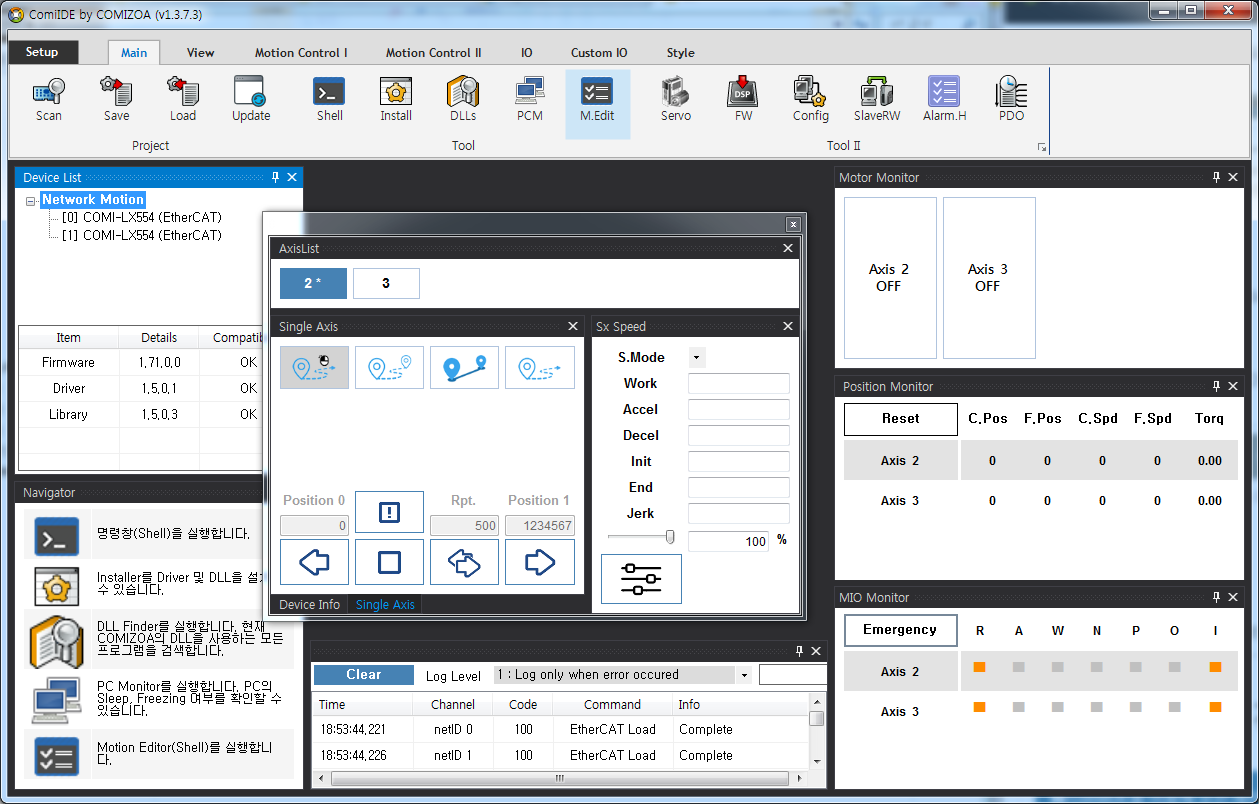
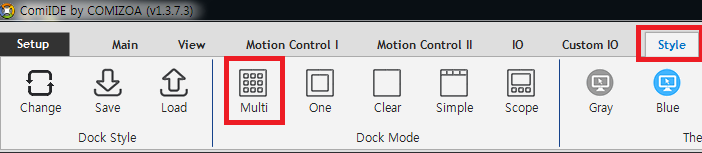
- 실행된 화면이 보기와 다를 경우, - 를 클릭합니다.
실행 확인
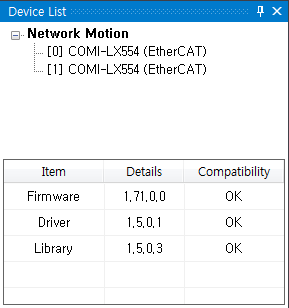
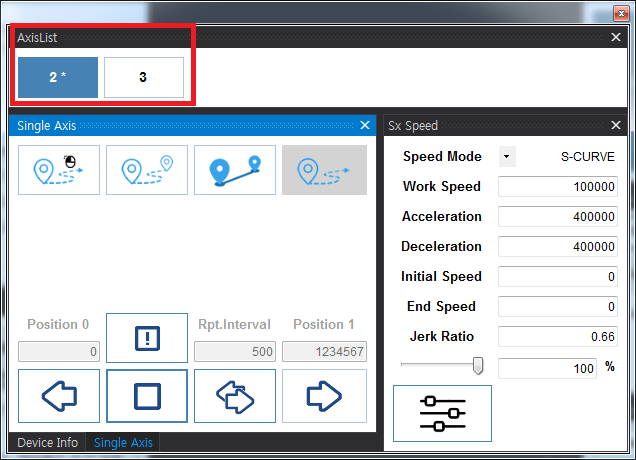
- DeviceList를 확인하여, 테스트를 위한 제품이 정상적으로 Load 되었는지 확인합니다.
- Device가 보이지 않는 경우, 디바이스 인식 실패를 참조하시기 바랍니다.
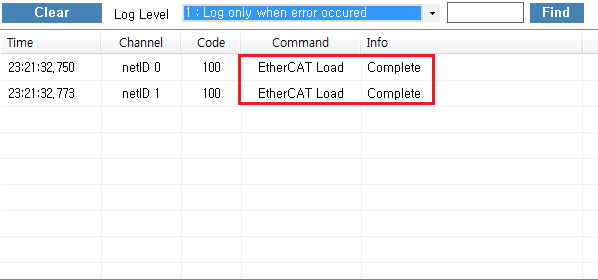
- LogView를 확인하여 Load 과정에서 에러가 발생하지 않았는지 확인합니다.
- LogView에 대한 내용은 Log View를 참조하시기 바랍니다.
Servo On
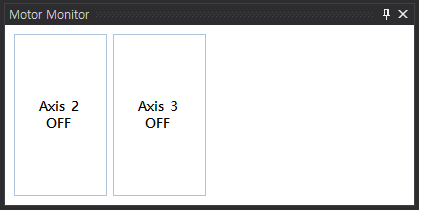
- Motor Monitor의 상태가 다음과 같은지 확인합니다.
- 원하는 축을 클릭하여 Servo_On 상태로 변경합니다.
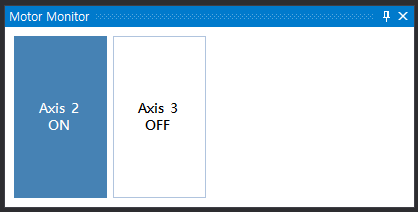
- Motor Monitor는 Motor의 상태를 나타냅니다. 현재 상태는 ServoOn 이후 Stop 상태입니다.
- Motor Monitor에 대한 내용은 Motor Monitor를 참조하시기 바랍니다.
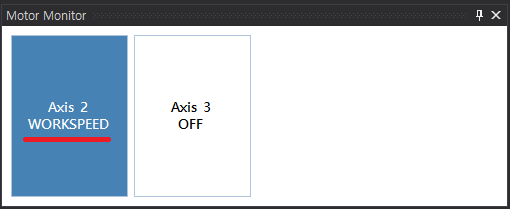
Motor State
- Motor가 이미 구동 중이거나, 알람이 발생한 경우 해당 상태값을 표시합니다.
- Motor 상태가 Alarm으로 표시되는 경우, 알람 원인을 제거한 후 클릭하면 알람 클리어가 됩니다.
- 알람 클리어 후 다시 클릭하면, Servo-On 상태로 변경됩니다.
- MIO Monitor를 확인하여 Motor가 구동 가능한 상태인지 확인합니다.
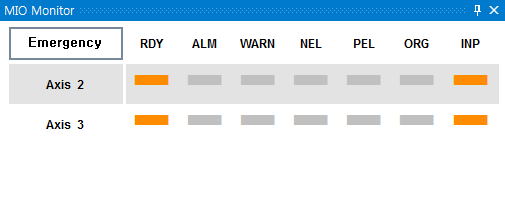
- 일반적으로, Alarm이 발생하였거나, PEL (Limit+) / 또는 NEL(Limit-)에 신호가 들어와 있는 경우, 모터 구동이 되지 않을 수 있습니다.
- Ready 신호를 지원하는 서보라면, RDY에 신호가 들어와야 합니다.
- MIO Monitor에 대한 내용은 MIO Monitor를 참조하시기 바랍니다.
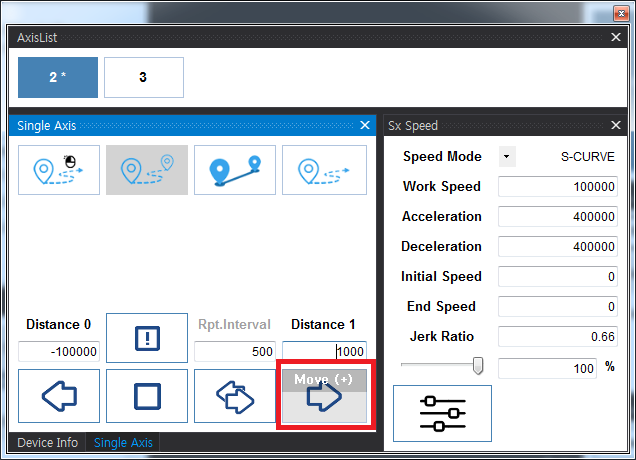
속도설정
- 선택된 축의 속도를 설정합니다.
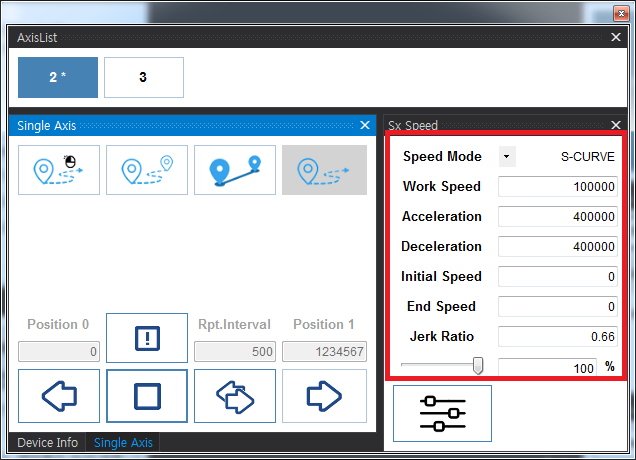
- 모터의 분해능에 따라 모터가 빠르게 움직일 수 있으므로, 안전을 위해 최대한 낮은 속도로 이송하는게 좋습니다.
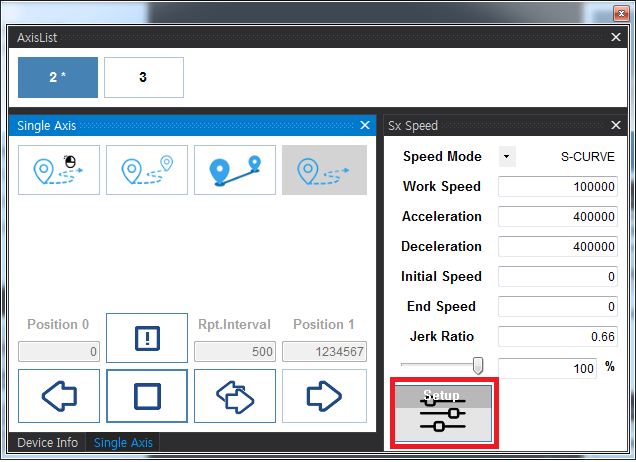
- Setup 버튼을 클릭해야 변경된 속도가 적용됩니다.
- 속도설정에 대한 내용은 SetSpeed_Sx를 참조하시기 바랍니다.
- KeyPad에 대한 내용은 KeyPad를 참조하시기 바랍니다.
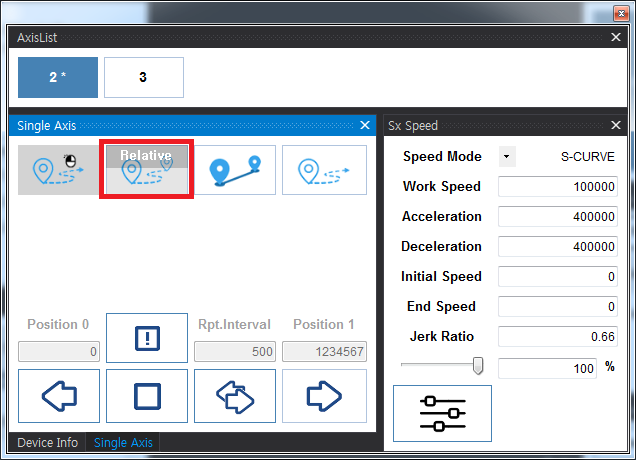
이송
- 짧은 거리의 상대이송1)을 위해 RelativeMove-Mode로 변경합니다.
- Distance를 클릭하여 이송할 거리를 설정합니다.
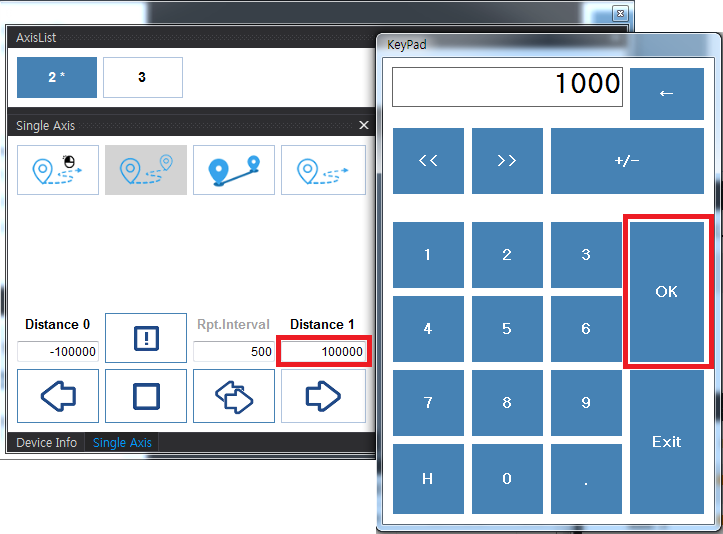
- Move 버튼을 클릭하여 이송을 시작합니다.
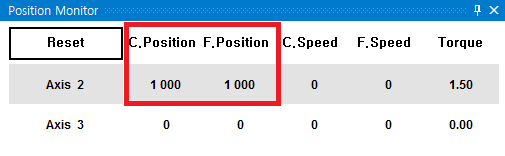
- Position Monitor 에서 Command Position 과 Feedback Position을 비교하여 실제 이송이 이루어졌는지 확인합니다.
- Position Monitor에 대한 내용은 Position Monitor를 참조하시기 바랍니다.
- Motor 분해능에 따라, 이송이 이루어졌으나 육안으로 확인하기 힘든 경우가 있습니다.
- 이송 명령만큼 Feedback Position이 변경되었다면, 이송은 정상적으로 수행된 걸로 볼 수 있습니다.
- 만약 육안으로 확인이 힘들다면, 이송 거리를 늘려서 다시 테스트 하시기 바랍니다.
- 이송이 제대로 이루어지지 않았다면, 플랫폼에 따라 Trouble Shooting을 참조하시기 바랍니다.
- PCI_Pulse TroubleShooting를 참조하시기 바랍니다.
- NEMO TroubleShooting를 참조하시기 바랍니다.
1)
정해진 거리만큼 이송